Distributed Computation Offloading and Trajectory Optimization in Multi-UAV-Enabled Edge Computing
 Xiangyi Chen
Xiangyi Chen
Abstract
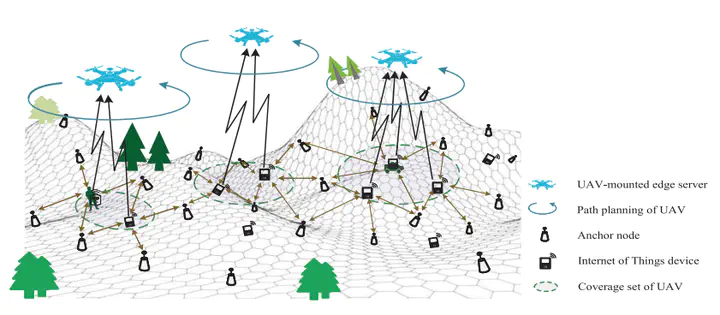
The Internet of Things (IoT) technology has expanded network space by interconnected devices, which has been widely used in various fields, such as environmental monitoring, object tracking, risk warning, etc. Due to insufficient computing capacity, limited battery life, and unreliable communication environment in IoT, unmanned aerial vehicle (UAV)-enabled edge computing has been recently utilized to provide enhanced coverage and efficient computational support in the scenarios with sparse or unreliable ground infrastructure, such as disaster rescue, emergency response, military fields, etc. However, UAV-enabled edge computing faces many challenges, such as low offloading efficiency, high energy consumption, high complexity, etc. In this article, a distributed computation offloading scheme is proposed to provide computational support to large-scale IoT nodes and optimize the energy efficiency of multiple UAVs. First, to provide accurate and efficient computational support, a real-time intelligent positioning algorithm is designed to obtain the precise location information of IoT nodes. Then, a distributed computation offloading and path planning algorithm is presented, which jointly optimizes the computation offloading of large-scale IoT nodes and trajectory planning of multiple UAVs to reduce the energy consumption of UAVs. Furthermore, we develop a closed-form theoretical analysis model to demonstrate that the algorithm enables a performance guarantee related to energy efficiency. Finally, extensive simulations have been conducted and show that the proposed scheme can greatly improve the system utility and energy efficiency.
Xiangyi Chen
Ph.D in Computer Science
My research interests include include edge computing, edge AI, software-defined networking, deep reinforcement learning, federated learning, etc.